人身動作運動抓捕分析系統,18618101725(微信同),QQ:736597338 ,信箱slby800@163.com
-
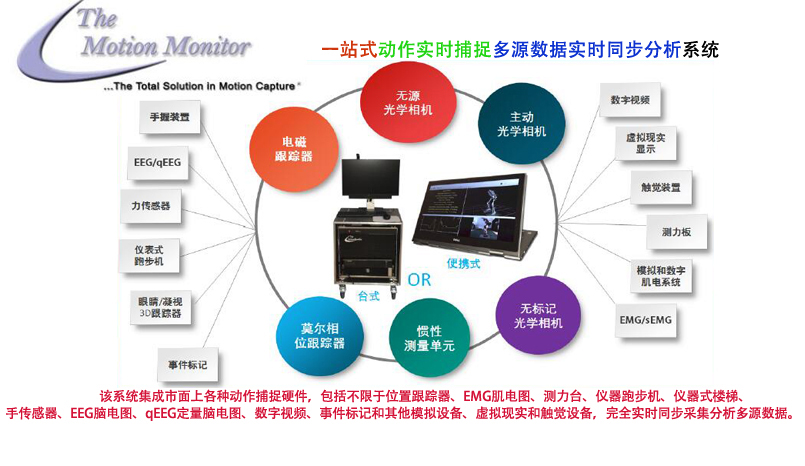
●一套交鑰匙3D動作與運動捕捉、分析系統,平臺旨在分析各種動作與運動的所有方面
-
●集各家之長為我所用:支持并提供廣泛市面上幾乎所有動作、運動硬件
-
●能夠將您的研究轉化為您自己的臨床、教學、人體工程學或運動應用
-
●全套、完整的多多尺度的生物力學研究和康復軟件
-
●根據需求一站式靈活選配,滿足各種運動與動作捕捉、監測、分析
-
●提供更加化、系統化的運動動作捕獲分析數據(包括骨骼、肌肉、血管、神經以及外部刺激等)
-
●完整的一站式交鑰匙3D動作捕捉分析系統:集成所有市面主流動作、運動硬件之長,系統化的數據深挖、分析、整合。
-
●支持從廣泛的硬件(所有市面主流動作、運動硬件)進行實時采集。
-
●使用測力臺、手傳感器、EMG、眼動追蹤、視頻、EEG、虛擬現實、觸覺和模擬數據同步采集運動數據,簡化采集和分析。
-
●通過原始或處理數據的圖形顯示提供即時回放。
-
●無需編程工作——從設置到數據收集再到分析,操作可以通過單選按鈕和下拉菜單完成。
-
●提供跨各種硬件系統的通用軟件平臺,可取各家之長、更高性價比。
-
●廣泛的功能和能力的多樣性,支持各種應用程序。
-
●市場上的數據采集、分析和可視化系統可測量人體運動、動作的所有方面。
基礎硬件:motionmonitor可集成各種捕捉硬件的系統裝置及完全同步采集分析多源數據的軟件
支持各種捕捉技術:確保技術性價比
支持各種外圍設備:實現人體動作捕捉分析所有方面
一站交鑰匙式服務:避免處理多個供應商的麻煩,MotionMmonitor支持團隊一鍵式呼叫將解決硬件和軟件相關問題:
典型應用簡介:
1、生物力學與生命科學
二、神經科學與運動控制
三、康復與人體工程學:

我們的方案裝置可以協助師、運動訓練師和人體工程學專家進行評估、篩查和再培訓:
實時信息提供了評估績效并向工作人員或患者提供即時反饋的能力。
同步的外圍數據,例如 EMG 和測力臺,允許對可能導致運動的其他因素進行運動學之外的研究。
用戶定義的、圖標驅動的界面為您獨特的協議提供定制,以確保可靠和簡單的數據收集和分析。
實時生物反饋和虛擬現實,使用多種方式顯示數據,將評估擴展到訓練和行為改變。
原始的、處理過的或用戶定義的數據允許評估康復技術或工作場所環境的有效性。可以立即生成自定義報告以與臨床醫生、風險管理人員和其他人共享此數據。
在數據收集過程中,可以跟蹤、動畫和分析真實的物體,例如工具或茶杯,以監控工人或患者與周圍環境的互動。
定制的交鑰匙解決方案,包括便攜式系統,使用各種動作捕捉技術,允許在任何環境下收集數據。
四、運動生物力學
我們的方案裝置通過許多獨特的功能提供監控運動員和提高表現的能力,包括:
使用佳的運動跟蹤技術來跟蹤、動畫和分析運動員的運動和運動對象,如高爾夫、擊球、投球、網球、保齡球、騎自行車等。
執行運動特定分析以進行評估、篩選和重返賽場。
以各種方法訪問和可視化數據,包括報告摘要、條形圖和時間序列圖、自定義動畫和跟蹤。
使用音頻反饋為培訓和性能增強提供實時反饋。使用虛擬現實擴展實時反饋,為運動員創造身臨其境的體驗。
使用我們的運動監視器特殊用途應用程序對特定運動或與運動相關的運動進行簡化的數據收集和分析,例如:
運動監視器跳躍版: PT、AT 和教練的理想工具,可使用反向運動、深蹲或俯沖快速評估生物力學和神經肌肉性能。
棒球運動監視器:研究質量的動作捕捉解決方案,具有用于跟蹤和分析球員投球和擊球動作的簡化流程。
更多詳細配置方案,請咨詢產品顧問:李經理,18618101725 
1.2.1步態分析的技術分類
紅外光學動作捕捉技術經歷數十年的持續發展,目前常用的紅外光學動作捕捉技術都是基于計算機視覺原理[4]。紅外攝像頭的光學步態捕捉主要分為被動式和主動式。被動式是在人體關鍵部位粘貼反光標記點,主動式是在人體主要部位佩戴上可發射紅外線的主動式攝像頭。本節主要說明被動形式的光學步態捕捉。在人體的主要骨骼部位以及關節處粘貼反光標記點,利用架設好的紅外攝像頭追蹤反光標記點(Markers),從而計算出反光標記點在空間中的位置。反光標記點和紅外攝像頭分別如圖1-1和圖1-2所示。
反光標記點既不會接收無線信號也不會向外發射任何無線信號,它的表面涂抹了一種特殊熒光材料,可以很好地讓紅外攝像頭識別到并反射回高質量的圖像信號。
基于紅外攝像頭的光學步態動作捕捉系統優點是技術成熟度高,采樣頻率高,加之目前的高性能計算機數據處理速度*快所以延遲很低,且精度很高,使用范圍廣,應用領域眾多。主要缺點是對光照特別敏感,不能在光變化較大的環境下使用,周圍不能有和光學標記點相近的物體或光斑,所以光學步態捕捉一般只在室內使用。由于攝像頭的視場角有局限性,且人在運動時有的標記點很容易受到其他物體及自身的遮擋,這就造成被遮擋部位數據的丟失。后期數據處理工作量很大,由于數據量大且需要處理丟失、跳幀等問題,需要較長的后期處理時間。缺點還在于需要架設相機,相機一般架設到鋼架結構上,這就造成使用場景一般比較固定,不能輕易的挪動。一般的場景至少需要6個攝像頭,如果需要追蹤更大的場景,需要的攝像頭數量高達幾十個,且單個攝像頭價格十分價貴,比如Vicon公司生產的單個攝像頭價格高達十萬元,這就造成紅外光學式步態捕捉還是應用到科學研究方面,無法走進大眾。
1.2.1.2基于3D深度攝像頭的動作捕捉
表1-1 3D深度攝像頭方案對比
利用結構光方案的產品有微軟公司推出的Kinect,其廣泛的應用在體感交互、人體骨架識別、步態分析等領域。
基本原理是首先找到圖像中移動的物體,然后會對移動的物體進行深度評估,識別出人體的部位,然后將其從背景環境中分割出來。分割之后要做的工作就是模式匹配,將其匹配到骨骼系統上。算法流程如圖1-7所示。
1.2.1.3基于2D攝像頭的動作捕捉
慣性動作捕捉系統主要是將慣性傳感器綁定在人身體主要骨骼上,如足、小腿、大腿,實時測量出每段骨骼的旋轉,利用正向運動學(Forward kinematics,FK)和反向運動學(Inverse kinematics,IK)實時推導計算出整個人身體的運動參數。慣性動作捕捉系統的優勢在于他是一種無源的動作捕捉系統,不需要借助任何外部信息,即不受外界環境的干擾。缺點則是由于慣性傳感器普遍存在累計漂移會使慣性系統無法測量出運動的位移。其全身穿戴效果如圖1-10所示。
慣性傳感器主要包括加速度計、陀螺儀、磁力計。其中加速度計、陀螺儀、磁力計多采用MEMS形式,所以稱之為MEMS慣性傳感器。三軸加速度計可以測量載體的三個軸向上的加速度,是一矢量,通過加速度我們也可以計算出載體靜止時的傾角。三軸陀螺儀可以測量出載體的三個軸向上角速度,通過對角速度積分我們可以得到角度, 。三軸磁力計可以測量出周圍的磁場強度及與地球磁場的夾角。通過融合加速度、角速度、磁力值的數據我們可以精準的得到載體的旋轉。融合后的數據一般用四元數或歐拉角來表示。其中四元數形式如 ,歐拉角包含俯仰角(Pitch)、橫滾角(Roll)、偏航角(Yaw)。得到載體的旋轉后再擬合各個骨骼的運動,從而計算出穿戴部位的運動姿態。通過對加速度、角速度的積分可以測量出穿戴者的步速、步距、步長等參數。上的MEMS慣性動作捕捉系統研發生產公司國外有荷蘭Xsens、國內的北京孚心科技公司等。綜述其原理如圖1-11所示。
基于MEMS慣性傳感器的動作捕捉系統的步態分析有很大的優勢,主要體現在由于慣性動作捕捉系統采用的是MEMS芯片,成本較低,每個芯片只需要十元左右,整套系統的價格在幾萬元級別。由于慣性動作捕捉系統是一種無源的系統,整套系統的重量在幾千克的范圍內,所以便于攜帶,且不需要架設繁雜的相機。慣性傳感器只需要開機后就可以使用,沒有繁雜的校準、標定等操作步驟,所以使用十分便捷。慣性動作捕捉系統不受使用環境的影響,不管在室內、還是室外都可以正常使用。 但是MEMS傳感器的精度相比于光學動作捕捉系統來講,精度較低,但對于大眾人群已經完全滿足其需求。由于MEMS式陀螺儀存在零偏且在動態情況下積分累計誤差會隨著時間的推移而產生較大的漂移。MEMS加速度計在不同的狀態下也存在誤差,特別是在高動態下。磁力計很容易受到強磁環境的干擾。但是這一系列的誤差問題都可以通過算法來補償。MEMS式慣性傳感器補償后的靜態精度一般可達到:俯仰角/橫滾角≤0.2°,偏航角≤1°;動態精度:俯仰角/橫滾角≤0.5°, 偏航角≤2°,步態位移誤差可達5%。已滿足步態參數計算的精度要求。
其他的技術路線還有基于聲學式的動作捕捉,基于電磁式的動作捕捉等。